A Novel Computational Framework for Identifying Prosthesis-Specific & Patient-Specific Contributions to Gait Deviations
People with above-knee (transfemoral) amputations often walk with abnormal patterns that can lead to secondary health issues such as joint pain, arthritis, and back problems. While improvements in prostheses designs and subject-specific training strategies can help mitigate these risks, current gait evaluation methods are limited in their ability to distinguish between contributions from the prosthesis and the patient.
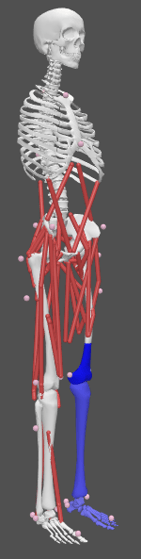
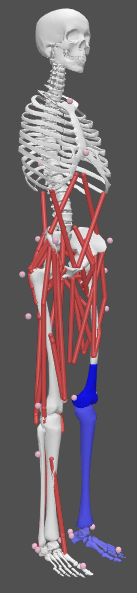
This work presents a novel computational framework designed to overcome these limitations by isolating prosthesis-specific effects on gait dynamics. The approach employs three musculoskeletal models: a fully able-bodied model, an ideal prosthesis model, and a full prosthesis model; all driven by identical reference joint kinematics (angular positions, velocities, and accelerations at the hip, knee, ankle, etc.). By systematically comparing the joint kinetics (forces and moments) across these models, the framework identifies the mechanical demands introduced by prosthesis design and quantifies deviations resulting from patient adaptations.
A pilot study demonstrates the framework’s capability using simplified swing-phase models, highlighting differences in joint torque profiles due to prosthesis inertial properties and mechanical constraints. Optimization techniques are then employed to identify prosthesis configurations that best replicate able-bodied motion. Current work lays the foundation for clinically relevant tools that enable more effective prosthesis tuning and personalized rehabilitation strategies without requiring extensive patient testing. It has the potential to improve rehabilitation outcomes, reduce injury risk, and help clinicians better tailor prosthetic solutions for each individual.




Journal Publications
Nguessan, J-E., M.H. Ahmed, M. Leineweber and S. Goyal, 2024, “Piloting a three model approach for isolating device-specific contributions to gait deviations with above knee prostheses”, International Journal for Numerical Methods in Biomedical Engineering, Dec;40(12):e3876. doi: 10.1002/cnm.3876. Epub 2024 Oct 10. PMID: 39389926; PMCID: PMC11618235.
Ahmed, M.H., J-E. Nguessan, R. Das, M. Leineweber and S. Goyal, 2024, “Simplified Cost Functions Meet Advanced Muscle Models to Streamline Muscle Force Estimation”, BioMed, 2024, 4(3), 350-365; https://doi.org/10.3390/biomed4030028.
Conference Abstracts
J-E. Nguessan, M. H. Ahmed, M. Leineweber and S. Goyal, “Simulation-Driven Analysis of Gait With Lower Limb Prosthesis”, Aug 14-17, 2022, Presentation-only Abstract in ASME IDETC.CIE 2022, St. Louis, Missouri.
J-E. Nguessan and S. Goyal, “Investigating Whether Feedback Delay Induced Limit-Cycle Oscillations Must Diminish with Large Scale Motions or Not”, Aug 17 – 19, 2021, Virtual, Online, International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. (Presenter)
Notable Projects along the PhD
Stabilization of Linear Systems with Distributed Input Delay and Input Saturation
Developed control strategies for stabilizing linear systems with inherent time delays and input constraints. This work deepened my understanding of robust control techniques for real-world dynamic systems.
Comparison Between Nonlinear Control Theory and PID Control for a 2-DOF Pendulum Cart System
Implemented and evaluated nonlinear controllers against traditional PID methods on an underactuated pendulum cart system. The project demonstrated control trade-offs in real-time performance and energy efficiency for robotics applications.
Deriving Equations of Motion of the Human Arm Using the Lagrangian Approach
Formulated a 4-DOF dynamic model of the human arm to simulate and analyze motion dynamics. This work served as a foundation for control-oriented modeling in human-machine interaction.
Neural Network-Based Estimation of Spring Constant and Damping in an SDOF System
Proposed and validated a feedforward neural network for estimating physical parameters in a mechanical oscillator. This exercise served as an educational proof-of-concept bridging classical dynamics and modern AI tools for system identification.